自動運転 - 3次元地図生成とその応用
Autonomous Driving - Generation and Application of 3D Map
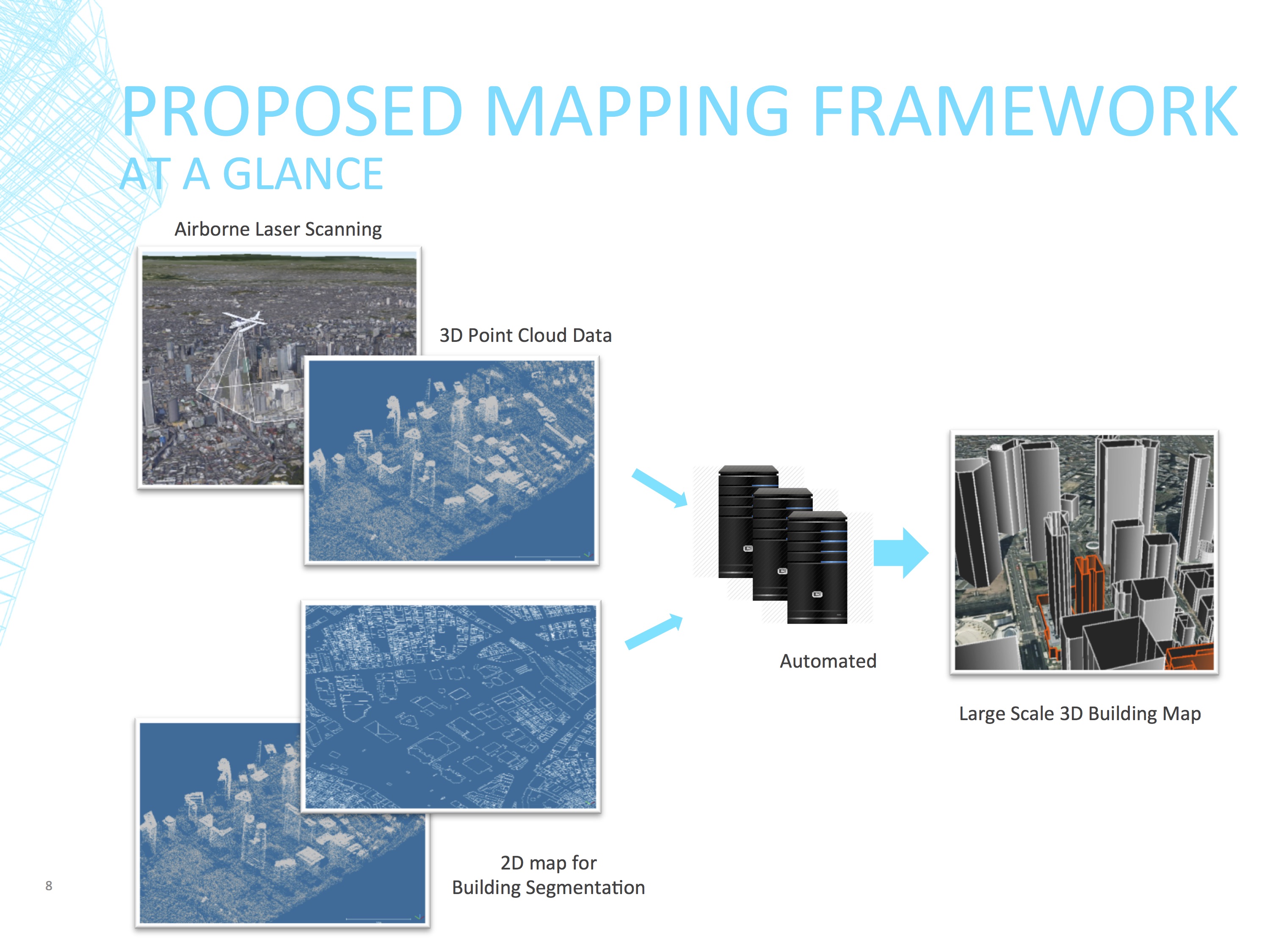
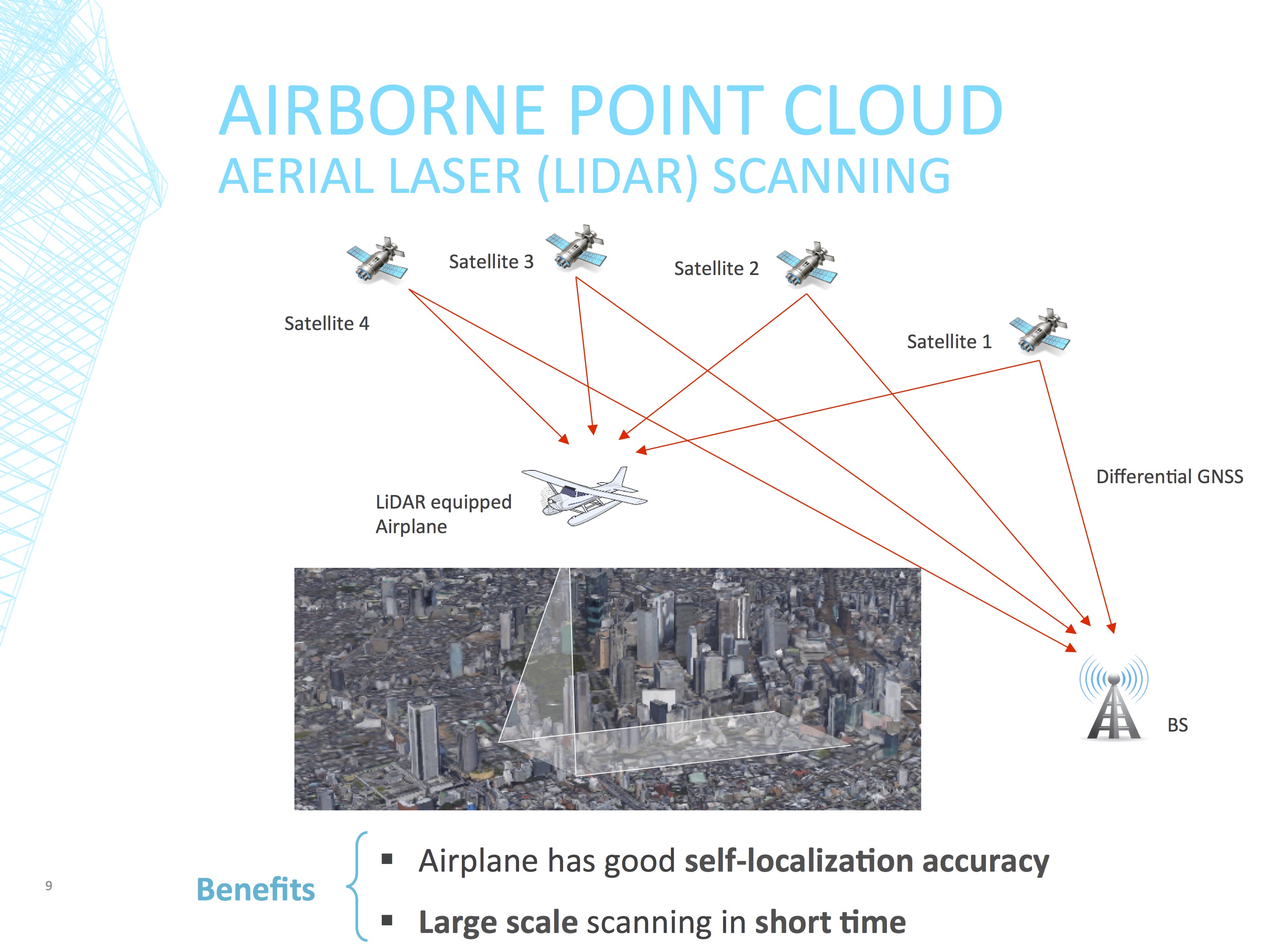
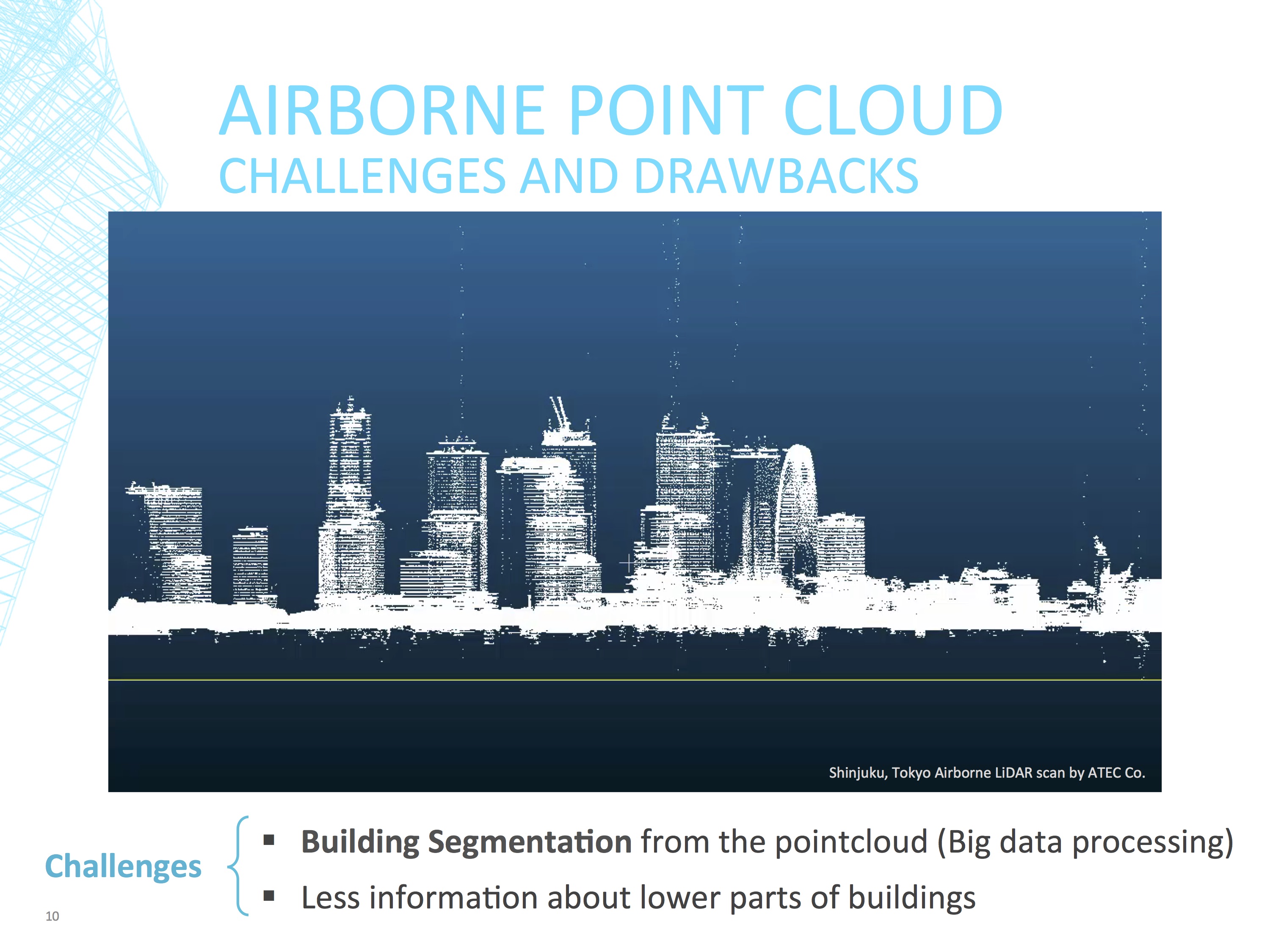
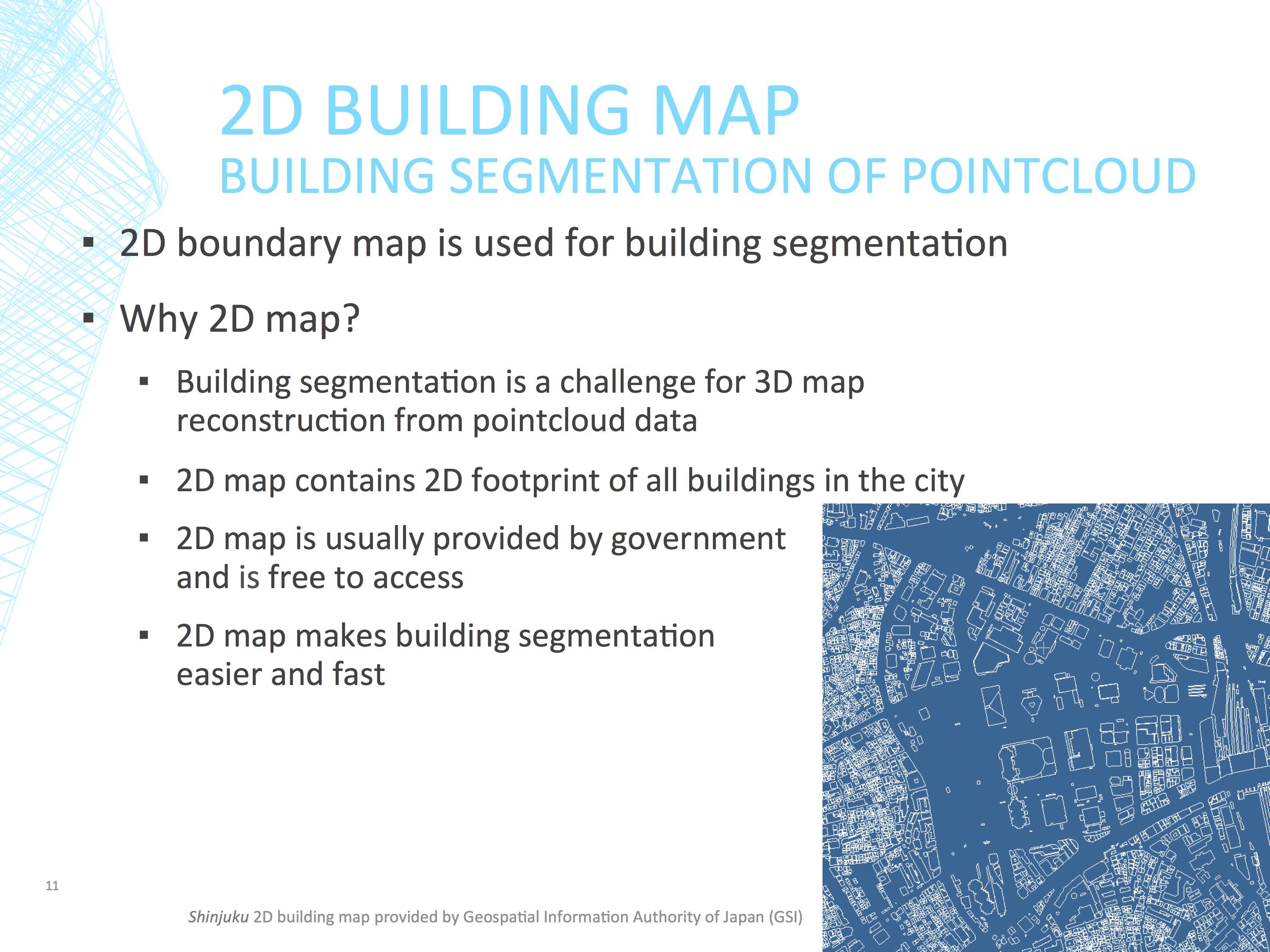
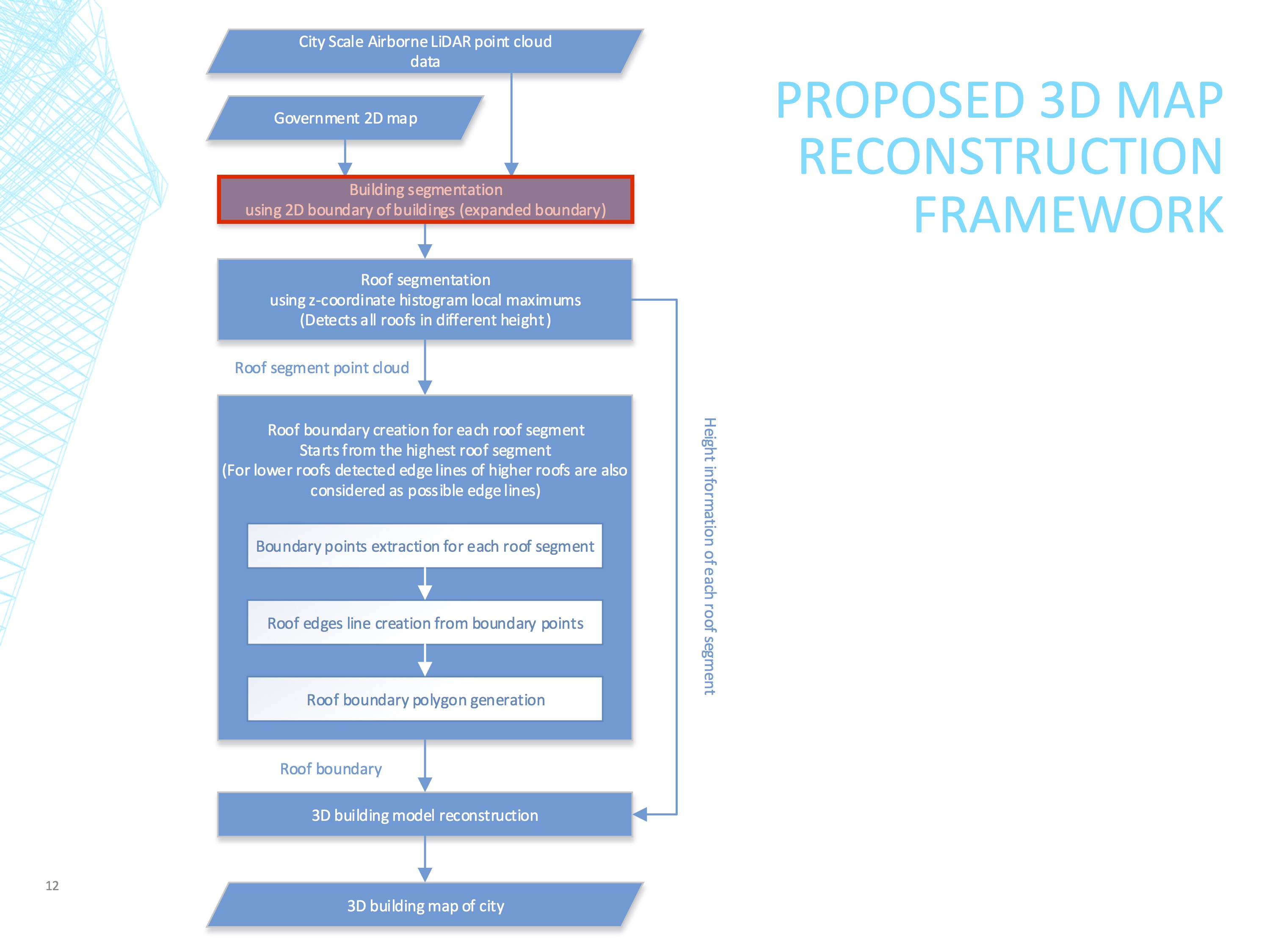
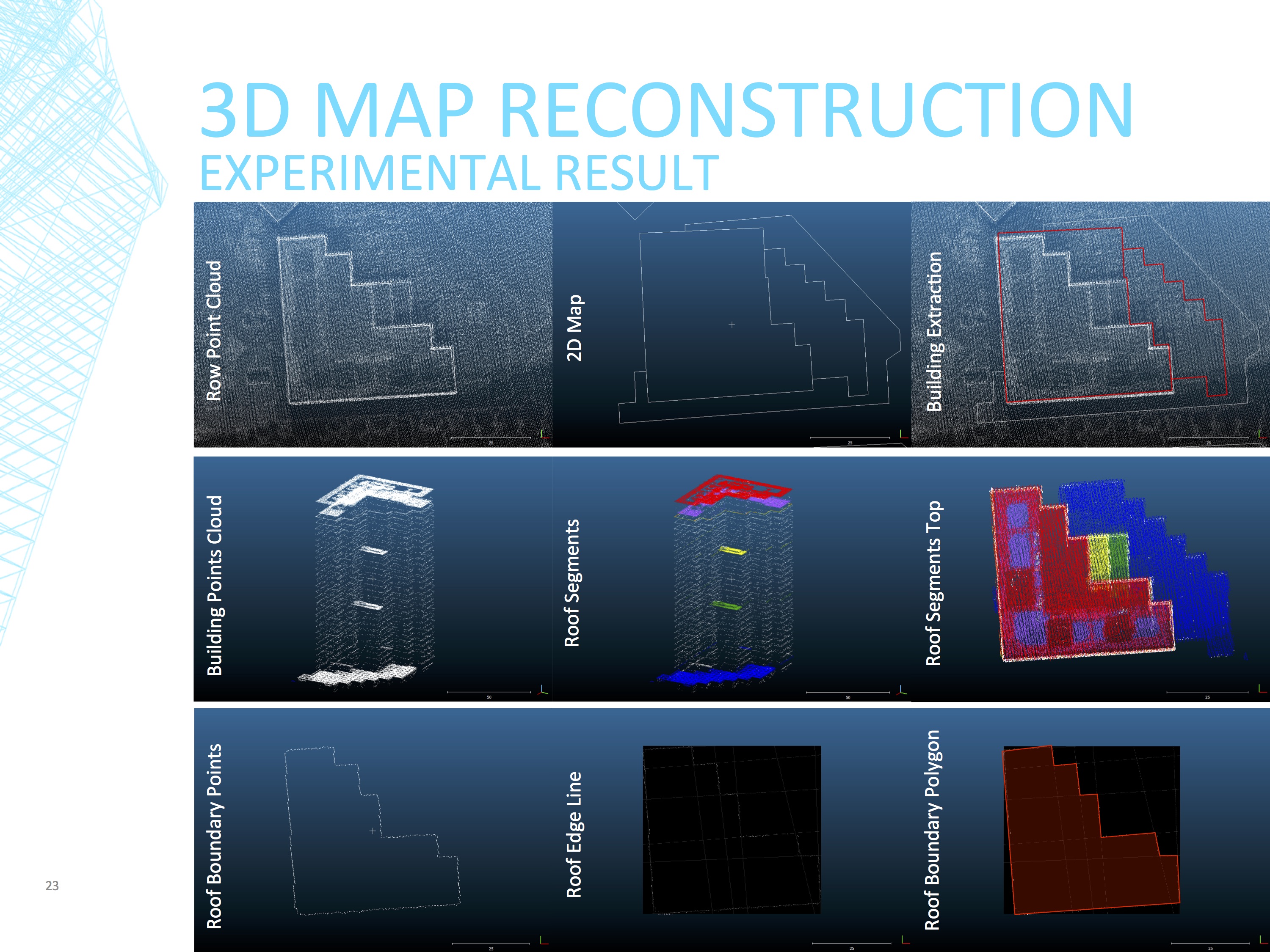
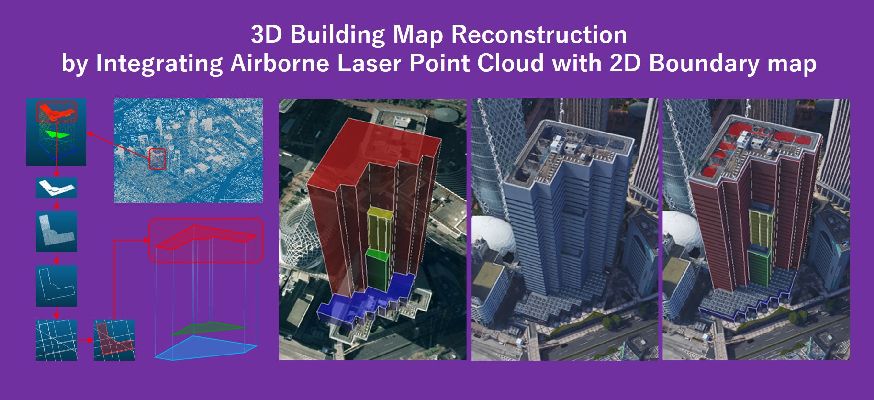
3次元建物地図はGNSSやVelodyneを用いた自動車の自己位置推定に恩恵をもたらしますが、 ビルが互いに近接する都市部において、高精度な3次元建物地図を自動生成することは非常に難しいです。 一般に3次元建物地図は詳細な2次元地図に建物の高さを与えることで生成されますが、多くの場合で2次元建物地図は建物のフットプリントのみを提供するため、新宿のような都市部での 複雑な建物の3次元形状を表現するのには不十分です。 一方で、レーザースキャニングの技術の発展により、大規模な3次元マッピングのために上空からのスキャニングが用いられるようになってきています。 しかし、この3次元点群のみを用いた3次元建物形状の再構成は建物境界の決定が難しくなるため、建物の密集する都市部では難しいです。 そこで、上空からスキャンした3次元点群と2次元の建物境界地図を組み合わせた3次元建物地図の再構成手法を提案します。
Vehicle self-localization techniques, such as GNSS and Velodyne, can benefit greatly by accessing to an accurate 3D building map, especially in urban areas. Though, an accurate automatic 3D building map reconstruction is challenging in dense urban areas, in which buildings are located close to each other. In general, 3D building map can be generated from adding accurate height information of the building roofs to a detailed 2D map. But 2D building maps usually only provide footprint of the buildings which is not enough for 3D shape modeling of complicated buildings in urban areas such as Shinjuku, Tokyo, Japan. On the other hand, with the development of laser scanning technology, airborne laser scanning (ALS) has now become easily accessible for large scale 3D mapping. However, an automatic 3D map reconstruction using only airborne point cloud is not feasible for dense urban areas, because of the difficulty of defining boundary of each building individually. We propose an automatic 3D building map reconstruction technique which integrates airborne laser point cloud with 2D boundary map.